Ultrasonisk sensor bruges til at måle afstand med ultralyd

Ultrasonisk Sensor
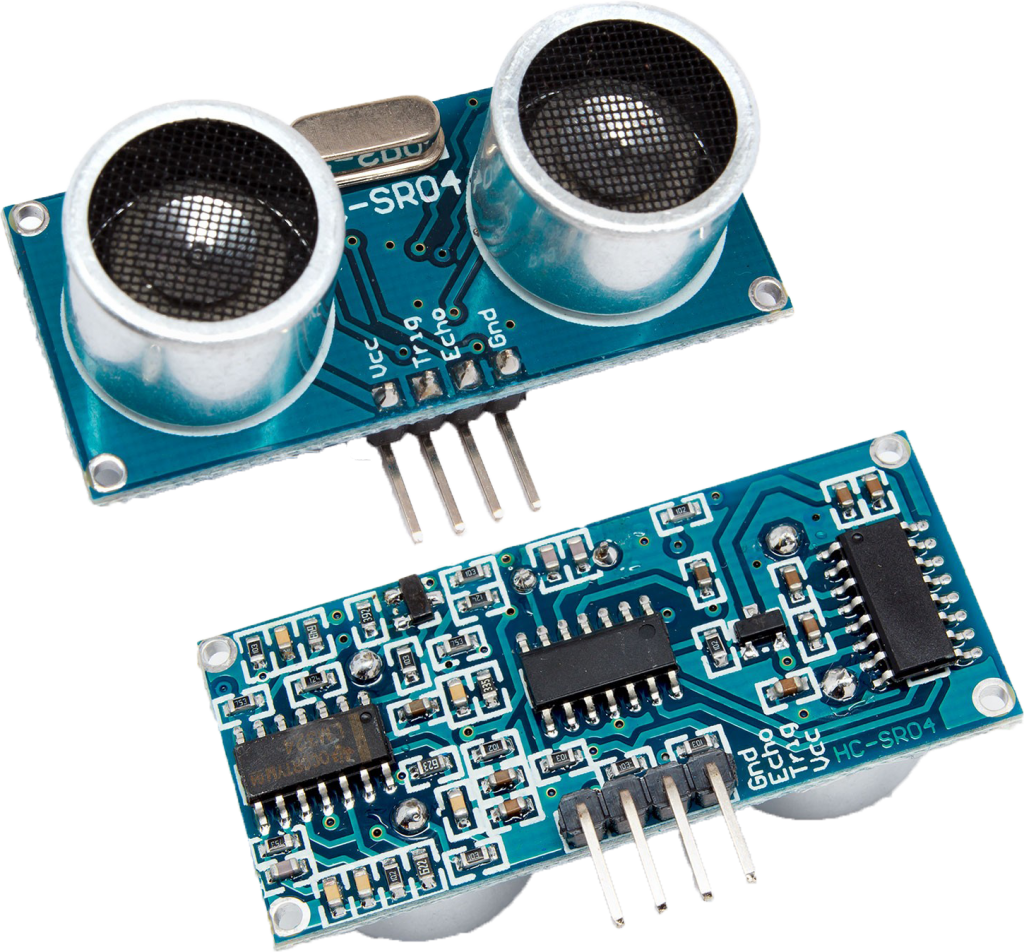
Den ultrasoniske sensor kan anvendes til mange forskellige projekter. Den fungere ved at der er to forskellige moduler på fronten det ene sørger for at sende ultrasonisk lyd ud, når det så rammer en forhindring vil lyden reflekteres tilbage til det andet modul som opfanger den ultrasoniske lyd, herved kan den udregne afstanden via. den tid det har taget for det ultrasoniske signal at komme fra det udgående modul, til det bliver ramt af det indgående modul.
En ultrasonisk sensor kan anvendes på biler, som baksensor for at sørge for at man ikke rammer noget når man parkere bilen.
Tekniske specifikationer
| Operativ Spænding | 5 VDC |
| Operativ strømstyrke | 15mA |
| Operativ frekvens | 40Hz |
| Max. måleafstand | 4m |
| Min. måleafstand | 2cm |
| Målevinkel | 15 grader |
| Trigger Input Signal | 10uS TTL pulse |
| Echo Output Signal | Input TTL lever signal and the range in proportion |
Kode Eksempel
#Libraries
import RPi.GPIO as GPIO
import time
#GPIO Mode (BOARD / BCM)
GPIO.setmode(GPIO.BCM)
#set GPIO Pins
GPIO_TRIGGER = 18
GPIO_ECHO = 24
#set GPIO direction (IN / OUT)
GPIO.setup(GPIO_TRIGGER, GPIO.OUT)
GPIO.setup(GPIO_ECHO, GPIO.IN)
def distance():
# set Trigger to HIGH
GPIO.output(GPIO_TRIGGER, True)
# set Trigger after 0.01ms to LOW
time.sleep(0.00001)
GPIO.output(GPIO_TRIGGER, False)
StartTime = time.time()
StopTime = time.time()
# save StartTime
while GPIO.input(GPIO_ECHO) == 0:
StartTime = time.time()
# save time of arrival
while GPIO.input(GPIO_ECHO) == 1:
StopTime = time.time()
# time difference between start and arrival
TimeElapsed = StopTime - StartTime
# multiply with the sonic speed (34300 cm/s)
# and divide by 2, because there and back
distance = (TimeElapsed * 34300) / 2
return distance
if __name__ == '__main__':
try:
while True:
dist = distance()
print ("Measured Distance = %.1f cm" % dist)
time.sleep(1)
# Reset by pressing CTRL + C
except KeyboardInterrupt:
print("Measurement stopped by User")
GPIO.cleanup()
Pinout
Pinout
| Nummer | Navn | Function |
|---|---|---|
| 1 | VCC | Positiv forsyning (5V) |
| 2 | Trig | Trigger |
| 3 | Echo | Echo pin |
| 4 | GND | Negativ forsyning |
Hvordan fungerer den?
Referencer
Billeder og forklaring: https://lastminuteengineers.com/arduino-sr04-ultrasonic-sensor-tutorial/
Kode: https://tutorials-raspberrypi.com/raspberry-pi-ultrasonic-sensor-hc-sr04/
Inspiration og kommentarer
Er du faldet over links eller lignende, som kan være relevant for dine medstuderende så send os en mail på nini@kea.dk
